Toggle navigation
Home
Diseño
Arquitectura
Construcción
Hogar
Bricolaje
Decoración
Manualidades
Construcción, industria
La rotura del puente térmico
Sep 28, 2017
9175
Construcción, industria
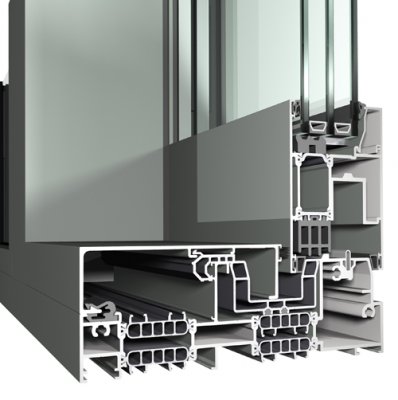
Ventanas de triple acristalamiento
Sep 25, 2017
6588
Hogar
Me molesta el ruido de mis vecinos
Sep 17, 2017
10247
Arquitectura
Aprovecha un vagón de tren para hacer tu casa
Sep 06, 2017
76160
Construcción, industria
Cuánto cuesta alicatar un baño.
Sep 05, 2017
24605
Construcción, industria
Puertas que aíslan del ruido, técnicas para aislar el ruido que puede penetrar por una puerta.
Sep 04, 2017
85512
Construcción, industria
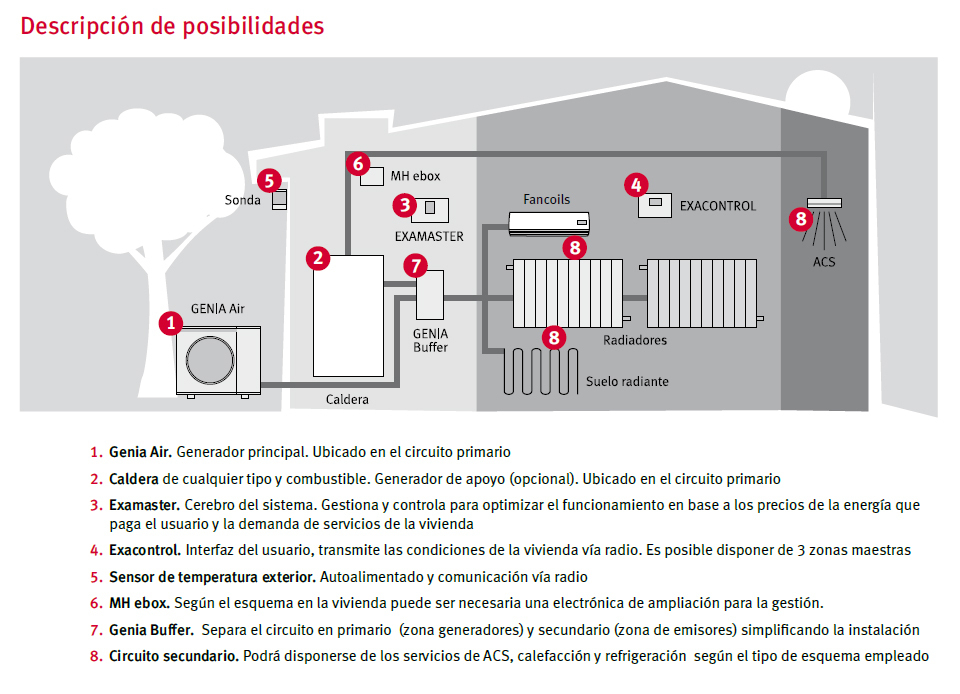
Sistemas híbridos de calefacción
Ago 07, 2017
7403
Construcción, industria
Qué son los forjados sanitarios
Jul 24, 2017
28212
Bricolaje
Poner un falso techo en mi casa
Jul 02, 2017
34845
Más vistos
Cuánto cuesta hacer una casa
Dic 31, 2014
Grietas en la pared
Dic 20, 2012
Puertas que aíslan del ruido, técnicas para aislar el ruido que puede penetrar por una puerta.
Sep 04, 2017
Los personajes del portal de Belén
Dic 18, 2013
Aprovecha un vagón de tren para hacer tu casa
Sep 06, 2017
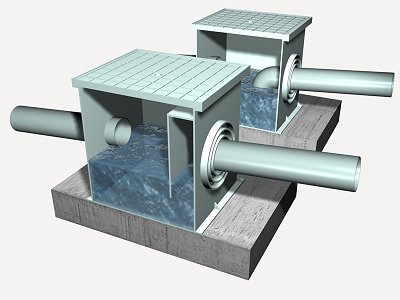
Arquetas sifonicas. Red de saneamiento
Oct 09, 2017
Cómo abrir un hueco en el forjado
Ene 21, 2013
Categorias
Arquitectura
2
Bricolaje
2
Ciudades
5
Construcción
298
Decoración
298
Hogar
3
Manualidades
0
Mobiliario
0
Fotos
Redes sociales
Popular
Reciente
La piedra en la fachada de los edificios
Ene 29, 2013
Consejos para comprar una estufa de bioetanol.
Dic 15, 2014
Una casa de madera diferente
Ene 23, 2013
Reformar la red de fontanería de tu casa
Ene 30, 2013
Las cocinas dentro de la decoración de nuestras casas
Dic 19, 2013
Las chimeneas eléctricas. Guia para comprar una chimenea eléctrica
Nov 26, 2017
Guía para comprar una chimenea o una estufa de leña
Nov 19, 2017
Arquetas sifonicas. Red de saneamiento
Oct 09, 2017
Como arreglar las juntas de los azulejos
Oct 01, 2017
La rotura del puente térmico
Sep 28, 2017
Más leidos
Cuánto cuesta hacer una casa
Dic 31, 2014
Grietas en la pared
Dic 20, 2012
Puertas que aíslan del ruido, técnicas para aislar el ruido que puede penetrar por una puerta.
Sep 04, 2017
Los personajes del portal de Belén
Dic 18, 2013
Aprovecha un vagón de tren para hacer tu casa
Sep 06, 2017
PORTADA
Nov 26, 2017
La temperatura media del planeta seguirá aumentando
Ene 02, 2014
Aprende lo que es una reacción exotérmica
Mar 02, 2014
Qué es el calendario cósmico
Oct 01, 2014
TOP
Nov 19, 2017
Suscríbete a nuestro RSS Feeds
Manténte informado un par de veces al mes de nuestras novedades
Share Post
Share on Facebook
Share on Twitter
Tags:
Share Post
Share on Facebook
Share on Twitter
Nov ,
Nov ,
Más sobre
Quizás te interese